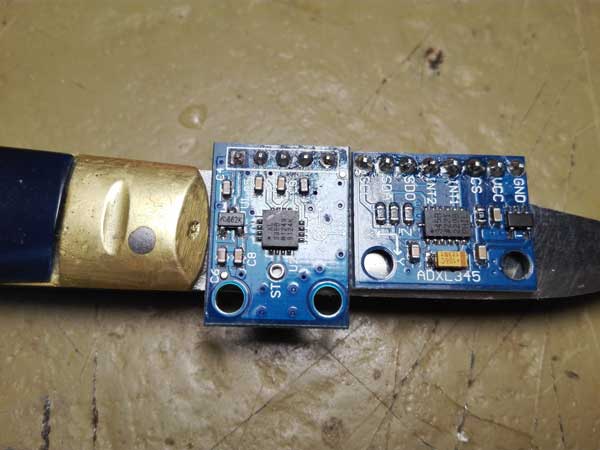
شرح ماژول ADXL345:
ADXL345 یک شتاب سنج 3 محوره با مصرف انرژی کم می باشد که دقت اندازه گیری بالای دارد (13 بیت) و تا 16g قابلیت اندازه گیری دارد. خروجی دیجیتال این شتاب سنج به صورت 16 بیتی می باشد. برای دسترسی یه آن می توان از ارتباط SPI یا I2C استفاده کرد. ADXL345 برای اندازه گیری شتاب استاتیک جاذبه در کاربرد های تشخیص شیب و شتاب پویا ناشی از حرکت یا شوک مناسب می باشد. حالت های مختلف اندازه گیری در ADXL345 موجود می باشد مثل تشخیص وجود یا عدم وجود حرکت تشخیص شتاب در هر محور که بیش از مقدار تنظیم شده باشد قابلیت تشخیض تپ و سنجش سقوط آزاد اگر دستگاه در حال سقوط آزاد باشد. این عملکردها را می توان به وسیله یک یا دو پین و وقفه خارجی پیاده سازی کرد.
ویژگی ها :
- ولتاژ تغذیه 2.0 تا 3.6 ولت
- مصرف بسیار کم: 40uA در حالت اندازه گیری و 0.1uA در استندبای @2.5V
- تشخیص تپ یا دابل تپ
- تشخیص سقوط آزاد
- اینترفیس SPI و I2C
دانلود ها:
اتصال ماژول ADXL345 به آردوینو:
در این قسمت به نحوه اتصال بورد ADXL345 به آردوینو می پردازیم در جدول پایین نحوه اتصال هر پین نوشته شده است.
| Arduino Pin | ADXL345 Pin |
| 10 | CS |
| 11 | SDA |
| 12 | SDO |
| 13 | SCL |
| 3V3 | VCC |
| Gnd | GND |
و به صورت تصویری

کد ساده برای شروع کار با ADXL345:
//Add the SPI library so we can communicate with the ADXL345 sensor #include <SPI.h> //Assign the Chip Select signal to pin 10. int CS=10; //This is a list of some of the registers available on the ADXL345. //To learn more about these and the rest of the registers on the ADXL345, read the datasheet! char POWER_CTL = 0x2D; //Power Control Register char DATA_FORMAT = 0x31; char DATAX0 = 0x32; //X-Axis Data 0 char DATAX1 = 0x33; //X-Axis Data 1 char DATAY0 = 0x34; //Y-Axis Data 0 char DATAY1 = 0x35; //Y-Axis Data 1 char DATAZ0 = 0x36; //Z-Axis Data 0 char DATAZ1 = 0x37; //Z-Axis Data 1 //This buffer will hold values read from the ADXL345 registers. char values[10]; //These variables will be used to hold the x,y and z axis accelerometer values. int x,y,z;
این پست تکمیل نشده چون فرصت تکمیل کردنش رو نداشتم همین طوری منتشرش کردم شاید به درد کسی خورد اگر به ادامه این پست علاققه دارید از لینک زیر ادامه بدید!