A4988
درایور استپر موتور A4988: راهنمای جامع راهاندازی، تنظیم و عیبیابی + کد آردوینو
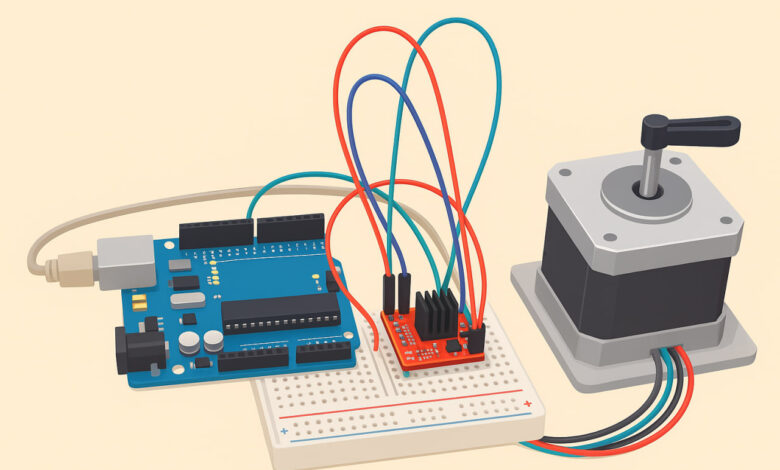
اگر شما هم از آن دسته افرادی هستید که در پروژههای رباتیک، CNC یا پرینترهای سهبعدی فعالیت دارید، قطعاً نام درایور استپر موتور A4988 به گوشتان خورده است. این درایور کوچک اما قدرتمند، یکی از محبوبترین قطعات در جامعه Maker و مهندسان الکترونیک است. در این پست، به صورت کامل با این درایور، روش راهاندازی، تنظیمات، برنامهنویسی با آردوینو و نحوه عیبیابی آن آشنا خواهیم شد.
درایور استپر موتور A4988 Reprap
فهرست مطالب
- مقدمهای بر درایور استپر موتور A4988
- ویژگیهای کلیدی A4988
- پیناوت و نحوه اتصال
- راهاندازی عملی و تنظیم جریان
- راهاندازی با آردوینو (کد و اتصالات)
- تنظیم ریزپله (Microstepping)
- کاربردهای رایج در پروژهها
- تست و عیبیابی رایج
- جمعبندی
1. مقدمهای بر درایور استپر موتور A4988
درایور استپر موتور A4988 یک تراشه درایور استپر موتور با رگولاتور پلهای (stepper motor driver) است که به صورت گسترده در پروژههای DIY، پرینترهای سهبعدی و دستگاههای CNC استفاده میشود. این درایور با قابلیت کنترل موتورهای دوپلار (Bipolar) و پشتیبانی از ریزپله (Microstepping)، دقت و نرمی حرکت بسیار بالایی را ارائه میدهد.
2. ویژگیهای کلیدی A4988
- ولتاژ کاری: 8 تا 35 ولت
- جریان خروجی: تا 2 آمپر به ازای هر فاز (با خنککننده مناسب)
- پشتیبانی از ریزپله: Full, Half, Quarter, Eighth, Sixteenth (توسط پینهای MS1, MS2, MS3)
- حفاظت داخلی: حفاظت در برابر اضافهدما (Thermal Shutdown) و اضافهجریان
- سازگاری: قابل استفاده با میکروکنترلرهایی مانند Arduino, Raspberry Pi, STM32 و غیره
3. پیناوت و نحوه اتصال
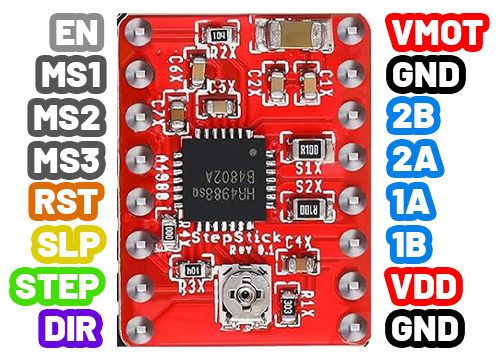
درایور A4988 دارای پینهای زیر است:
- VMOT: تغذیه اصلی موتور (8-35V)
- GND: زمین
- VDD: تغذیه منطقی (3.3V یا 5V)
- 1A, 1B, 2A, 2B: خروجیهای متصل به سیمپیچهای موتور
- STEP: پین دریافت پالس حرکت (هر پالس = یک پله)
- DIR: پین تعیین جهت حرکت (HIGH/LOW)
- ENABLE: فعال/غیرفعال کردن درایور (LOW = فعال)
- MS1, MS2, MS3: انتخاب حالت ریزپله
- RESET, SLEEP: کنترل حالت خواب و ریست
اتصال صحیح این پینها به میکروکنترلر و منبع تغذیه بسیار مهم است.
4. راهاندازی عملی و تنظیم جریان
وسایل مورد نیاز:
- درایور A4988
- استپر موتور (مثلاً NEMA 17)
- منبع تغذیه 12V (با توجه به موتور)
- میکروکنترلر (مانند Arduino Uno)
- خنککننده (هیتسینک) برای درایور
- پتانسیومتر برای تنظیم جریان (اختیاری)
- مولتیمتر برای اندازهگیری ولتاژ REF
مراحل نصب:
- هیتسینک را روی تراشه A4988 نصب کنید.
- موتور را به پینهای 1A, 1B, 2A, 2B متصل کنید.
- منبع تغذیه موتور را به VMOT و GND وصل کنید.
- پینهای STEP و DIR را به پینهای دیجیتال Arduino متصل کنید.
- پین ENABLE را در صورت نیاز به یک پین دیجیتال وصل کنید (یا مستقیماً به GND برای فعال همیشه).
تنظیم جریان:
جریان خروجی توسط پتانسیومتر روی برد قابل تنظیم است. با اندازهگیری ولتاژ روی پین REF (معمولاً کنار پتانسیومتر) میتوانید جریان را تنظیم کنید. برای مثال، برای جریان 1A، ولتاژ REF باید حدود 0.4V باشد.
5. راهاندازی با آردوینو (کد و اتصالات)
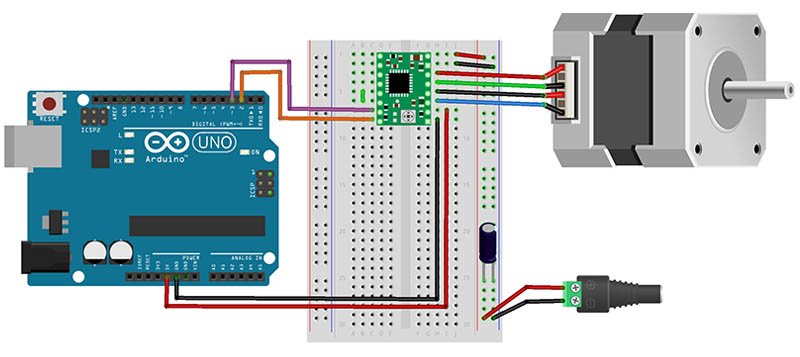
اتصالات سختافزاری آردوینو Uno با A4988:
| پین A4988 | پین آردوینو Uno |
|---|---|
| VDD | 5V |
| GND | GND |
| STEP | پین 3 (یا هر پین دیجیتال دیگر) |
| DIR | پین 2 (یا هر پین دیجیتال دیگر) |
| ENABLE | پین 4 (یا به GND برای فعال دائمی) |
| VMOT | منبع تغذیه 12V+ |
| GND | منبع تغذیه 12V- |
| 1A, 1B, 2A, 2B | سیمپیچهای موتور استپر |
نکته مهم: حتماً GND منبع تغذیه 12V را به GND آردوینو نیز متصل کنید تا یک مرجع زمین مشترک داشته باشید.
کد پایه آردوینو (Basic Code):
// تعریف پینهای متصل شده
const int dirPin = 2;
const int stepPin = 3;
const int enPin = 4;
// تنظیمات Steps per Revolution - بسته به موتور شما تغییر میکند (معمولاً 200 برای NEMA17)
const int stepsPerRevolution = 200;
void setup() {
// تعیین حالت پینها
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(enPin, OUTPUT);
// غیرفعال کردن حالت Sleep و Reset (اگر از این پینها استفاده میکنید)
// digitalWrite(enPin, LOW); // اگر ENABLE را به GND وصل نکردهاید، این خط را فعال کنید
}
void loop() {
// تعیین جهت حرکت ( clockwise)
digitalWrite(dirPin, HIGH);
// ایجاد پالس برای چرخش موتور
for(int x = 0; x < stepsPerRevolution; x++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(500); // سرعت موتور را کنترل میکند
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000); // توقف یک ثانیهای
// تغییر جهت حرکت (counter-clockwise)
digitalWrite(dirPin, LOW);
// ایجاد پالس برای چرخش موتور در جهت مخالف
for(int x = 0; x < stepsPerRevolution; x++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000); // توقف یک ثانیهای
}
کد پیشرفته با استفاده از کتابخانه AccelStepper (توصیه شده):
برای کنترل حرفهایتر، نصب کتابخانه AccelStepper از طریق Library Manager پیشنهاد میشود.
#include <AccelStepper.h>
// تعریف نوع موتور و پینها (Driver motor - STEP/DIR)
AccelStepper stepper(AccelStepper::DRIVER, 3, 2); // STEP Pin 3, DIR Pin 2
void setup() {
// تنظیم حداکثر سرعت و شتاب
stepper.setMaxSpeed(1000); // حداکثر سرعت بر حسب steps per second
stepper.setAcceleration(500); // شتاب بر حسب steps per second^2
// حرکت به موقعیت 1000
stepper.moveTo(1000);
}
void loop() {
// اگر موتور به موقعیت هدف رسیده باشد
if (stepper.distanceToGo() == 0) {
// تغییر جهت حرکت
stepper.moveTo(-stepper.currentPosition());
}
// اجرای یک step (همیشه در loop فراخوانی شود)
stepper.run();
}
6. تنظیم ریزپله (Microstepping)
با استفاده از پینهای MS1, MS2, MS3 میتوانید حالتهای مختلف ریزپله را انتخاب کنید. برای برنامهنویسی با آردوینو، میتوانید این پینها را نیز به آردوینو متصل و به صورت دیجیتال کنترل کنید.
| MS1 | MS2 | MS3 | حالت ریزپله | Steps/Rev (برای موتور 200 steps) |
|---|---|---|---|---|
| Low | Low | Low | Full Step | 200 |
| High | Low | Low | Half Step | 400 |
| Low | High | Low | Quarter Step | 800 |
| High | High | Low | Eighth Step | 1600 |
| High | High | High | Sixteenth Step | 3200 |
مثال اتصال برای کنترل ریزپله با آردوینو:
const int MS1_Pin = 5;
const int MS2_Pin = 6;
const int MS3_Pin = 7;
void setMicrostepping(int mode) {
// mode: 0=Full, 1=Half, 2=Quarter, 3=Eighth, 4=Sixteenth
digitalWrite(MS1_Pin, (mode >= 1 && mode != 2) ? HIGH : LOW);
digitalWrite(MS2_Pin, (mode >= 2) ? HIGH : LOW);
digitalWrite(MS3_Pin, (mode >= 4) ? HIGH : LOW);
}
7. کاربردهای رایج در پروژهها
- پرینترهای سهبعدی: کنترل محورهای X, Y, Z و اکسترودر
- دستگاههای CNC: کنترل حرکت محورها با دقت بالا
- رباتیک: کنترل حرکت بازوهای رباتیک و پایههای متحرک
- سیستمهای اتوماسیون: کنترل موقعیت در سیستمهای صنعتی
8. تست و عیبیابی رایج
موتور حرکت نمیکند:
- اتصالات تغذیه و موتور را بررسی کنید.
- پین ENABLE را بررسی کنید (اگر وصل است، باید LOW باشد).
- ولتاژ REF را برای اطمینان از تنظیم صحیح جریان چک کنید.
موتور داغ میکند:
- جریان خروجی را با پیچ تنظیم روی درایور کاهش دهید.
- از خنککننده مناسب استفاده کنید.
حرکت نامنظم یا لرزش:
- حالت ریزپله را تغییر دهید.
- منبع تغذیه را از نظر نویز بررسی کنید.
- در کد آردوینو،
delayMicroseconds()را افزایش دهید.
مشکل در ارتباط با آردوینو:
- از اتصال صحیح GNDهای مشترک اطمینان حاصل کنید.
- پینهای STEP و DIR را با استفاده از
digitalWriteوdelayتست کنید.
9. جمعبندی
درایور استپر موتور A4988 یک انتخاب عالی برای پروژههای مبتنی بر کنترل حرکت با دقت بالا است. با راهاندازی صحیح، تنظیم مناسب جریان، برنامهنویسی دقیق با آردوینو و استفاده از قابلیت ریزپله، میتوانید به عملکرد بهینه و پایدار دست پیدا کنید. امیدواریم این راهنمای جامع برای شما مفید بوده باشد.
منابع و لینکهای مفید:
اگر سوالی دارید یا تجربهای در استفاده از A4988 دارید، در بخش نظرات با ما به اشتراک بگذارید!